In this module, we will discuss two other types of classifier handshapes – handling classifiers and entity-classifiers.
In sign languages, handling classifiers represent the shape of the hand or other object handling or gripping the referent (Sandler & Lillo-Martin, 2006). Handling classifiers are typically used for predicates describing actions of the hands. In Example 1 to 5 below, the predicates have incorporated handling classifiers which show how the objects are gripped by a human hand.
Example 1
CL[=put on cab]
‘put a cab on head’
Example 2
DOOR CL[=open door]
‘open a door by turning a door knob’
Example 3
TOWEL CL[=wring towel]
‘wring out a towel’
Example 4
BOX BIG HEAVY CL[=carry a big and heavy object]
‘carry a big heavy box’
Example 5
CL[=write on a vertical surface] FINISH CL[=wipe vertical surface with a brush]
‘write on the board and then wipe it off with a brush’
Handling classifiers are typically combined with motion verb roots. As handling classifiers are very gestural, they are highly similar across sign languages. Table 1 below shows further examples of handling classifiers and what they can stand for in HKSL (Tang, 2007).
Table 1. Examples of Handling classifier handshapes in HKSL
| Handling classifier handshapes | What the handling classifiers may stand for |
(1.1) |
Holding 3-dimensional cylindrical or narrow objects, e.g., elastic band, javelin, ice-cream cone. |
(1.2)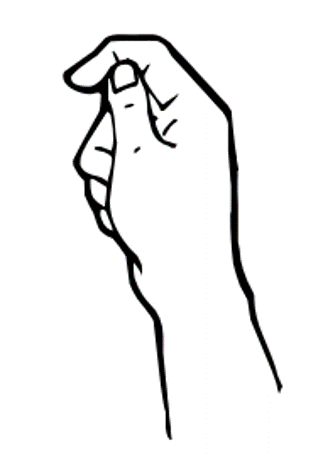 |
Holding long and narrow objects, e.g., fishing pole, spoon, and hammer. Holding small and narrow objects, e.g., key, toothbrush. |
(1.3)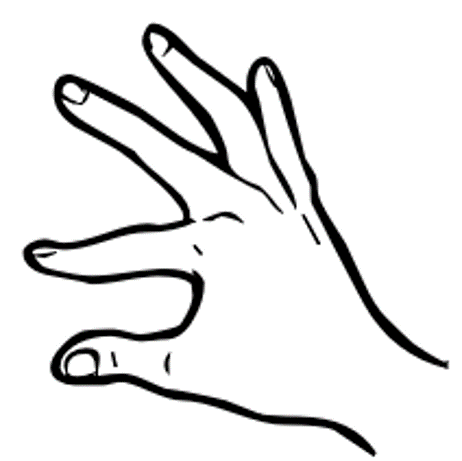 |
Holding small objects, e.g., wedding ring. |
(1.4)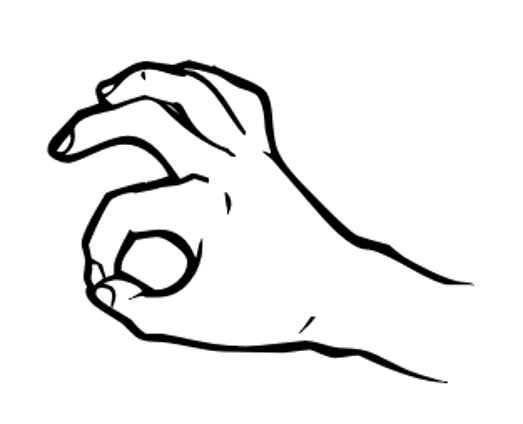 |
Holding small objects, e.g., toothpick, earring, teabag. |
(1.5)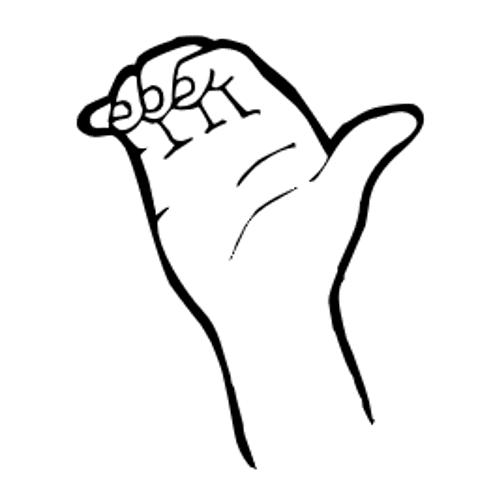 |
Holding small and flat objects, e.g., cell phone, soap, and camcorder. |
The third type of classifier handshapes is entity classifiers (also known as semantic classifiers). Entity classifiers look similar to SASSes on first glance, but they are more abstract. They refer to general semantic classes rather than to the visually perceived physical properties (Sandler & Lillo-Martin, 2006).
Example 6
MAN TALL CL[=animate being stand at] WOMAN SHORT CL[=animate being stand at]
‘A tall man stands next to a short woman.’
Example 6 describes a tall man standing next to a short woman. Although there is an obvious height difference, they are represented by the same classifier (i.e., the upright oriented Y-handshape) in the predicate (i.e., CL[=animate being stand at]). This is because the entity classifiers denote general semantic classes, rather than physical appearance of individuals. Hence, the Y-handshape can be used for human beings of varying heights and weights, adults or children, different kinds of animals which have a head, body, lower limps or tail.
Example 7
BUS BIG CL[=vehicle be located], CAR SMALL CL[=vehicle be located], CL[=one vehicle follows another]
A big bus is followed by a small car (on the road).
In Example 7, the entity classifier for vehicles is used to stand for the bus and the car. Although the bus is bigger than the car, the same classifier is used for the two classifier constructions. Table 2 shows further examples of entity classifiers and what they can stand for in HKSL (Tang, 2007).
Table 2. Examples of Entity classifier handshapes in HKSL
| Entity classifier handshapes | What the entity classifiers may stand for |
(2.1)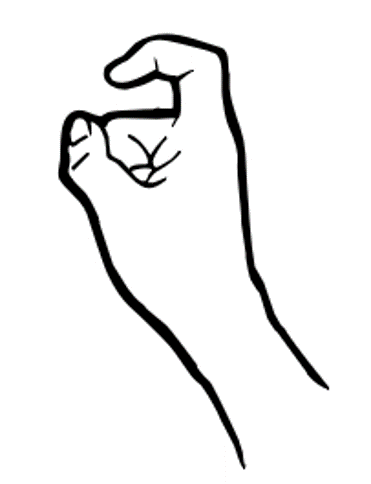 |
Tiny, animated, typically long and narrow non-human entities, e.g., shrimp, worm, bacteria. |
(2.2)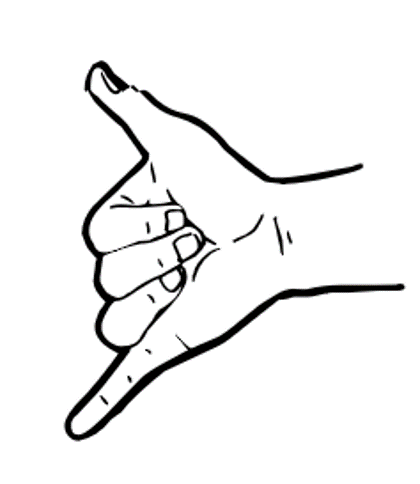 |
Animate whole entities with a head and lower limps (or tails), e.g., human beings, animals. |
(2.3)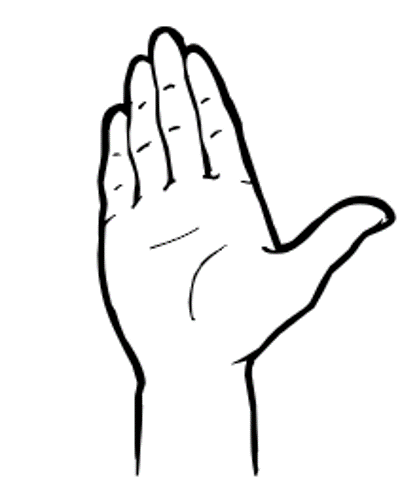 |
Vehicle, e.g., bus, car, truck. |
(2.4)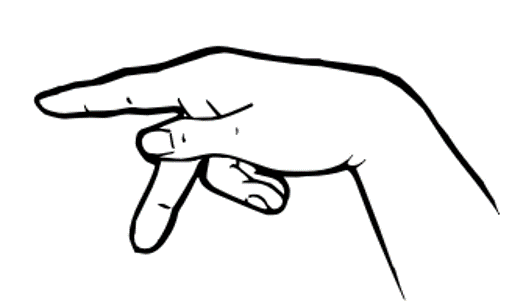 |
Bikes, e.g., bicycle, motorbike. |
(2.5) |
Human legged entities, e.g., swim, walk, jump. |
In this and the previous module, we have discussed examples of three types of classifier handshapes in sign languages, using examples from HKSL. Although classifiers denote salient characteristics of their associated referents, they do not have specific meanings on their own. If a signer signs CL[=animate being stands] out of context, the audience would not be able to pinpoint exactly what the classifier refers to. Hence, it is grammatically required that a classifier is preceded by its nominal antecedent first. Take Example 7 as an illustration. In this sentence, the signer first introduces BUS BIG, which constitute a nominal antecedent for the following classifier predicate CL[=vehicle be located].
As all our classifier examples have shown, classifier constructions capitalize on the visual iconicity of entities and events. In a classifier construction, the handshape, movement, orientation and location all bear meanings. Hence, a classifier construction such as CL[=one vehicle follows another] is actually multi-morphemic. For example, in the entity classifier that represents a vehicle, the fingertips of the B-flat handshape represents the front part of a car, the thumb side and pinky side of the hand represent the two sides of the car, and the wrist represents the back of the car. In addition, the forward movement of the classifier present means the car moves forward; while a backward motion means that the car is reversing. Similarly, the sideward turns are directly shown by the motion of the classifier predicate. Classifier constructions are very effective in expressing spatial relations among referents in the signing space.
References:
- Sandler, W., & Lillo-Martin, D. (2006). Sign language and linguistic universals. Cambridge University Press.
- Tang, G. (2007). Hong Kong Sign Language: A trilingual dictionary with linguistic descriptions. The Chinese University of Hong Kong.
![]()